
| Version 16 (modified by , 3 years ago) (diff) |
|---|
PV277 Programming Applications for Social Robots
Introduction
accounts and Choregraphe
- you may install Choregraphe and other Softbank development tools according to our installation instructions.
- Choregraphe introduction
- Create first project in Choregraphe:
- add
Czechto projectProperties - build program from:
Set Language,Say,Dialog,Say (1),Say (2)
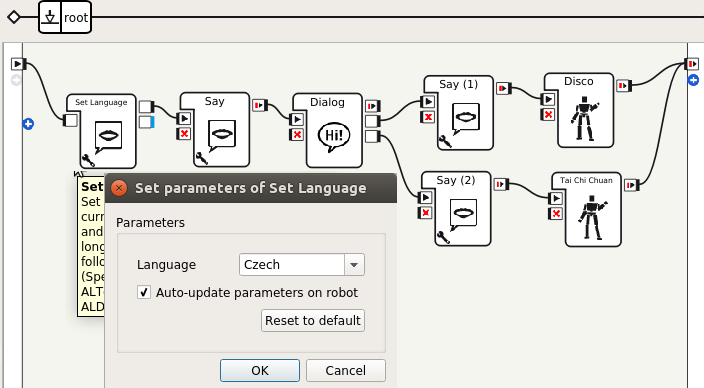
- add
CzechtoDialog(double click theDialogbox) - edit dialog file
ExampleDialog/ExampleDialog_czc.top:topic: ~ExampleDialog() language: czc u:(ano) $answer_yes=1 u:(ne) $answer_no=1
- add/change
Dialogbox outputs toanswer_yesandanswer_no, connect them to theSayboxes (useEdit boxwith right click) - Save the project
- add


virtual robot
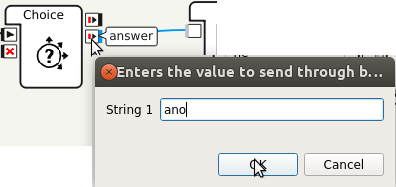
Edit->Preferences->Virtual Robot->Pepper Y20 (V16)Connection->Connect to virtual robot- virtual robot does not have speech recognition - input must be entered manually in Dialog window -
View->Dialog - Run the project
during execution write the answers in the Dialog

real robot
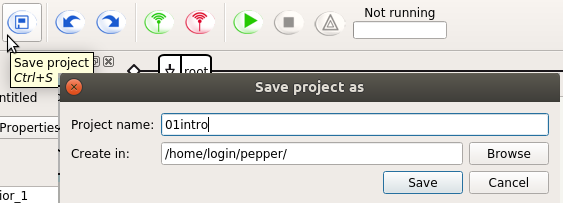
- Save your project
- copy the project directory
/home/<login>/pepper/01introto
/nlp/projekty/pepper/course/tmp/<login>/ - if launching on real robot produces error
behavior_1: permission violation(s): canRunOnPodthenbehavior.xarneeds a permission (in Inspector on the right) ofBehavior can be run on charging station(<permissions><canRunOnPod/></permissions>inmanifest.xml).
Attachments (6)
- robot_Karel_Pepper-EN.pdf (472.6 KB) - added by 6 years ago.
- pepper_run.png (8.6 KB) - added by 6 years ago.
- pepper_resources.png (62.6 KB) - added by 6 years ago.
- pepper_answer.png (16.9 KB) - added by 6 years ago.
- 01intro.png (53.8 KB) - added by 5 years ago.
- pepper_save.png (41.6 KB) - added by 9 months ago.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download all attachments as: .zip