
| Version 24 (modified by , 5 years ago) (diff) |
|---|
PV277 Programming Applications for Social Robots
How to get info from web?
Remember that Python usage in Pepper robots is limited to Python 2 and old version of packages. It is possible to install some (small) Python packages via pip --user to /home/nao but the space is limited.
If you want to test without the real robot, you can run the Python code using the virtual robot - see below.
Use API
If API exists, you can usually use JSON data after send the right parameters. Example to get weather data.
import requests url = "http://api.openweathermap.org/data/2.5/weather" params = {'q': 'Brno', 'units': 'metric', 'lang': 'cz'} r = requests.get(url=url, params=params) data = r.json() print(data['main']['temp'])
(Full example forecast.py )
Parse webpage data
If no API is provided, you can download and parse the webpage.
from bs4 import BeautifulSoup import requests page = requests.get(url).text soup = BeautifulSoup(page, features="lxml") results = soup.findAll('h2', attrs={'class':'article-title'})
(Full example news.py)
How to integrate info with robot?
There are 2 basic options:
- use simple dialog variables as input and say the results directly in the Python script
- use complex service (=a separate Python class/script) which fully integrates in the Pepper API
These options are detailed below.
Dialog variables
In dialog file, set value of variable, use it in Python script in behavior.
concept:(team) [sparta spartě slavie slavii]
u:(["Můj [oblíbený nejoblíbenější] tým je" "Fandím {týmu}"] _~team) $team=$1
First word after sentence is available in $1 and passed to the script as team variable.
def onInput_onStart(self, team): self.team_usr = team
Use TTS in script
veta = self.team_name + " má " + str(act_team.points) + " bodů" self.tts.say(veta)
Run script as service and parse service output
Specify service script in manifest.xml:
<services> <service autorun="true" execStart="/usr/bin/python2 scripts/rozvrh.py" name="rozvrh" /> </services>
In dialog, detect variables, pass them to service, and parse the call result to say answer:
u:(rozvrh) Pro jakou místnost bys chtěl znát rozvrh?
u1:({pro} {místnost učebnu} _~letter _~number) Podívám se na rozvrh pro $1 $2 ^call(Rozvrh.get_current_lesson($1, $2)) \pau=500\
c1:(In _* teaches _* course _*) V místnosti $1 je právě $3 s vyučujícím, který se jmenuje $2.
c1:(In _* currently _*) V místnosti $1 je právě $2
Note that in c1: we can use _* since this regular expression is matched against text from the service, not against human speech. The text can be in English (or even in non-language), the answer to humans is then specified in the concrete dialog topic, e.g. in Czech. Unfortunately, the documentation is not clear in what can and what cannot be matched by _* here, tests are needed with real data.
u1 detects letter and number (concepts defined earlier in dialog) and calls get_current_lesson(). This function return strings, that are parsed in dialog and answer is translated to each locale.
def get_current_lesson(self, letter, number): room = letter+str(number) lesson = self.rozvrh.find_current_lesson(room) if lesson: if lesson.teacher: teacher = lesson.teacher.split(' ')[-1] return "In %s teaches %s course %s" % (lesson.room, teacher, lesson.name) else: return "In %s currently %s" % (lesson.room, lesson.name)
Run script as service and use TTS in script
Detect variables in dialog, pass them to script and let script use TTS to say answer.
u:("[řekni ukaž zobraz najdi] {mi} [odjezdy spoje] ze zastávky _~station_name")
^call(DialogKordisbot.say_answer1($1))
Dialog detects word with station name and calls say_answer1(). No answer is passed back, answer is said directly in script.
def say_answer1(self, station): #get data finalDepartures answer_msg = "First line {} goes to {} at {}, second line {} goes to {} at {}, third line {} goes to {} at {}".format(finalDepartures[0][0], finalDepartures[0][1], finalDepartures[0][2], finalDepartures[1][0], finalDepartures[1][1], finalDepartures[1][2], finalDepartures[2][0], finalDepartures[2][1], finalDepartures[2][2]) self.s.ALAnimatedSpeech.say(answer_msg)
Testing a service with virtual robot
A service can be tested in the virtual robot settings.
- prepare an app with the service to test - you may start with the examples below or use the templater tool robot-jumpstarter (use a new name for your service):
ssh aurora cd /nlp/projekty/pepper/web/robot-jumpstarter python jumpstart.py python-service tweety-service TweetyService cp -a output/tweety-service ~/pepper/
Heretweety-serviceis the directory name of the application (and the app name),TweetyServiceis the API name of your service as it will be called from Python.
- copy the directory with the service app (e.g.
~/pepper/tweety-service) to your computer, where you run Choregraphe. All the following steps are done on this computer, not remotely via SSH. - start Choregraphe and run the virtual robot
- find out the port number of your virtual robot: click
and remember theIPandportfrom the table:

Here the virtual robot's address islocalhost:34121 - run your service in the virtual robot (Choregraphe must still be running, of course):
cd ~/pepper/tweety-service/app python scripts/tweetyservice.py --qi-url localhost:34121
The output should look like:[I] 1584373059.579170 4749 qimessaging.session: Session listener created on tcp://0.0.0.0:0 [I] 1584373059.579385 4749 qimessaging.transportserver: TransportServer will listen on: tcp://192.168.1.2:36873 [I] 1584373059.579394 4749 qimessaging.transportserver: TransportServer will listen on: tcp://127.0.0.1:36873
- now you can communicate with your running service in the same way as with all other API services on the real robot:
- use
^call(TweetyService.get())in a dialog - direct call in a Python Box code:
def __init__(self): self.tweety = ALProxy('TweetyService') def onInput_onStart(self): self.tts.say("číslo {}".format(self.tweety.get())) self.onStopped() #activate the output of the box
- use the qicli command line tool:
alias qicli='"/opt/Softbank Robotics/Choregraphe Suite 2.5/bin/qicli" --qi-url localhost:34121' qicli info TweetyService call TweetyService.get call TweetyService.set 2 call TweetyService.get
with the output099 [TweetyService] * Info: machine f883b92e-3a87-44e5-aa70-4a3b78f4d937 process 4749 endpoints tcp://192.168.1.2:36873 tcp://127.0.0.1:36873 * Methods: 100 get Int8 () 101 reset Void () 102 set Void (Int8) 103 stop Void () ------------------------------------------------------- 0 null 2
- use


Examples
Explore example applications in /nlp/projekty/pepper/myapps:
- kordisbot
- sport_bot
- rozvrh
Example app
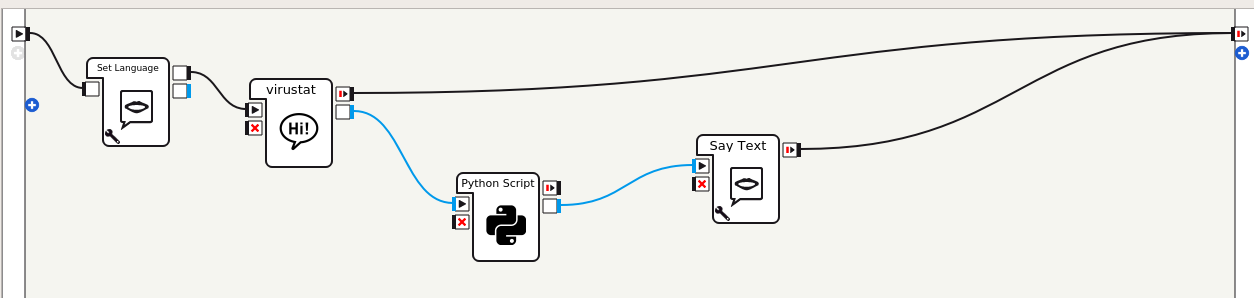
- Create new project in Choregraphe.
- As usual, add
Czechin project Properties. - Add
Set Languagebox and selectCzech. - Right click the free area ->
Create a new box->Dialog... - in the Dialog ->
Add Topic- chooseCzechandAdd to the package content as collaborative dialog(allows to start the dialog just by talking to the robot) - Connect
onStart->Set Language->Dialog - Right click dialog box ->
Edit box. FindOutputsand click on+button.Name: country,Type: string,Nature: punctual

- In Project files double click on
virustat_czc.topand entertopic: ~virustat() language: czc u:(ahoj) ahoj, pro který stát tě zajímá statistika? u1:(Česko) dobrá, česko $country=cs u1:(Německo) dobrá, německo $country=de - Value of variable
$countrywill be sent to the output namedcountry. - Right click the free area ->
Create a new box->Python... - Find
Inputsand click on the Edit icon next toonStart. setTypeto String. - Find
Outputsand click on+button.Name: returnStat,Type: string,Nature: punctual - Connect
countryoutput of the dialog withonStartinput of the Python script. - Add
Say Textbox and connectreturnStatoutput of the Python script withonStartinput ofSay Textbox. - Connect
onStoppedoutput ofSay Textbox withonStopped.

Attachments (7)
- dialoginputs.png (13.1 KB) - added by 5 years ago.
- pepper_connect.png (19.1 KB) - added by 5 years ago.
- pepper_virtual_port.png (14.4 KB) - added by 5 years ago.
- statapp.png (32.0 KB) - added by 5 years ago.
- news.py (458 bytes) - added by 3 years ago.
- forecast.py (1.3 KB) - added by 3 years ago.
- virustat.zip (6.3 KB) - added by 20 months ago.
{kind=link}
{kind=link}
Download all attachments as: .zip